![]()
|
|
The MRT Robot Team |
|
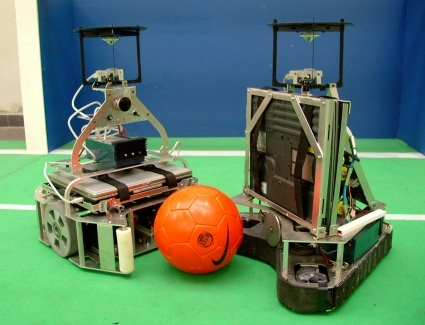
During its history, MRT has produced several models of soccer robots. Presently, our team enroles 5 robots: Rabbiati (goal-keeper), Recam, Ridan, Rigo e Ribra (omnidirectional robots). We have implemented both the mechanical and the electronic aspects of our robots. In 1998, we developed some copies of the robot base Mo2Ro (Modular Mobile Robot), with two independent traction wheels on the front and a ball pivot on the rear. The two then adopted in Robocup (Rullit and Rakataa) weight about 30 Kg each, and could run up to 1 m/s. It is quite difficult to control robots with this mass distribution, in particular when moving at high speed, so we have developed IANUS, a robot base with two independent, central, traction wheels and most of the mass central as well. The name comes from the Roman God with two faces, since this robot is designed to work indifferently in one of the two main directions. The 2004 implementation, can run up to 1.2 m/s. In 2001 we developed our first holonomic base (Achille): it had two independent wheels each mounted on a rotating turret, so to obtain holonomic movement, which fully integrates with our omnidirectional vision system, mounted on each robot. In 2002, we have produced two new holonomic robots, one with three linked, rotating wheels (the well known synchro-drive kinematics) and a rotating kicker-holder (Ringhio) then abandoned as non appropriate for Robocup, and the other one (Reseghè), with four cross-mounted kamro wheels, able to change its shape to adapt to game situations and to kick. In 2004, we have developed the new holonomic bases named Triskar from the name of the celtic symbol integrating three spirals: these have three kamro wheels. In all the latest developments, we have decided to have portable computers on board, to save weight and space of batteries. Moreover, we have introduced high modularity in the design, being able to reuse HW and SW modules on the different robots. |
|
We tend to use the same robot bases for service robots, also in slightly different configurations (e.g., Popeye, here on the right, is a Mo2Ro with an extensible arm on board, holding a camera and a two-finger hand). |
|
|
All the robots are equipped with control and power cards developed in our lab, and either an ITX low-power PC board, hosting low-cost frame grabber and wireless ethernet, or a laptop with a firewire camera. One of the main concerns in the development of these robots has been the cost, which ranges from 1,100 to 4,000 euros each, all included. These robots, as well as many of our service robots, are controlled by BRIAN, a system we have implemented to define and manage fuzzy-based behavioral modules. All the robots are coordinated by SCARE, a distributed architecture able to provide fault tolerant and adaptive performance for a Multi-Agent System. In SCARE, we have included some adaptive mechanisms which enable the team to adapt to opponent's strategies, and to possible degradation of the robot performance or of the communication quality. Some movies
concerning the performances of our robots are available here
|