The Ianus3 base
![]()
|
|
The Ianus3 base
|
|
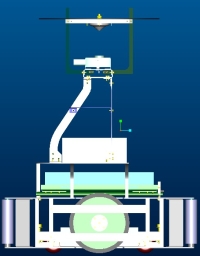
The bi-directional base IANUS has two independent, central, traction wheels and most of the mass placed on them. The name comes from the Roman God with two faces, since this robot is designed to work indifferently in one of the two main directions. The first versions had been developed by students of the AIRLab at Politecnico di Milano, under the supervision of Andrea Bonarini and Matteo Matteucci. Version 3 has been designed and mounted by Claudio Caccia (AIRLab).
|
||||||
|
|

