|
Reseghé
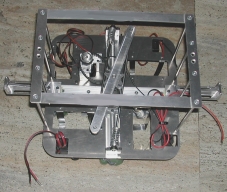
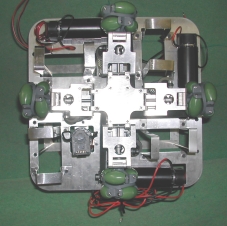
has four Kamro wheels in cross configuration. Two opposite wheels
are actuated by two independent 70W/24V motors, while the other
two are actuated by a unique 70W/24V motor through a differential
gear.
The
control is managed by a PMAC board, equipped
by a 40MHz DSP processor, able to control up to four motors,
kindly provided by the Italian dealer
Abaco.
|
 |
|
|
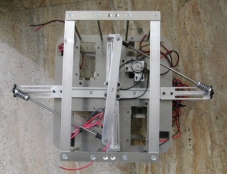
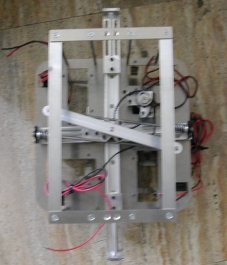
On
the body is mounted another 70W/24V motor to actuate a set of
rods and cranks, connected to carbonium plates forming the external
part of the body. This system makes it possible to change the
shape of the external body with the twofold aim of "having the right body
for the situation" (e.g., a large body in defense, and a narrow
one to sneak among the opponents), and of kicking the ball. The
rods are designed to have a quite strong kick (2 m/s) in two opposite
directions, and a kick suitable for the passage, in the other
two. Unfortunately, the actual implementation does not
match the specifications and has to be improved in a next
future.
|