The Triskar base
![]()
|
|
The Triskar base
|
|
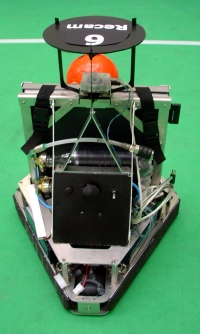
"Triskar" comes from the name of the tripartite celtic symbol (Triskell) and "car" These two robots have three independent, traction, omnidirectional wheels, each actuated by a 70W/24V motor, placed at 120 degrees from each other. The ball-handling mechanism is pneumatic and mounted on one side only, to reduce weight and costs. They mount a portable PC (P4 2.4GHz) each, and an omnidirectional camera. They have been designed implemented as Recam and Ridan by Claudio Caccia, with the collaboration of Andrea Bonarini, Marcello Restelli, and Matteo Matteucci, at AIRLab - DEI, Politecnico di Milano.
|

|
|